Questions and discussion for this lecture live here. Fire away by hitting Reply below ![]()
Can’t we just find the Z-local vector by using the X-local and V vectors without using the Gran Schmit process to find the Y-local vector?
As in using the cross product between X-local And V-vectors
And another question is, why don’t I just get the Y local vector from the difference between the i node coordinates and the offset node coordinates directly, other than going through the process of getting V-vector?
Hey Tala,
You definitely could use the X-local and V vectors to find a vector Z, perpendicular to the X-Y plane. G-S is used here to get Y-local, at that point, when Y-local and X-local are already obtained as unit vectors, it’s just convenient to use these to get the unit Z-local.
Seán
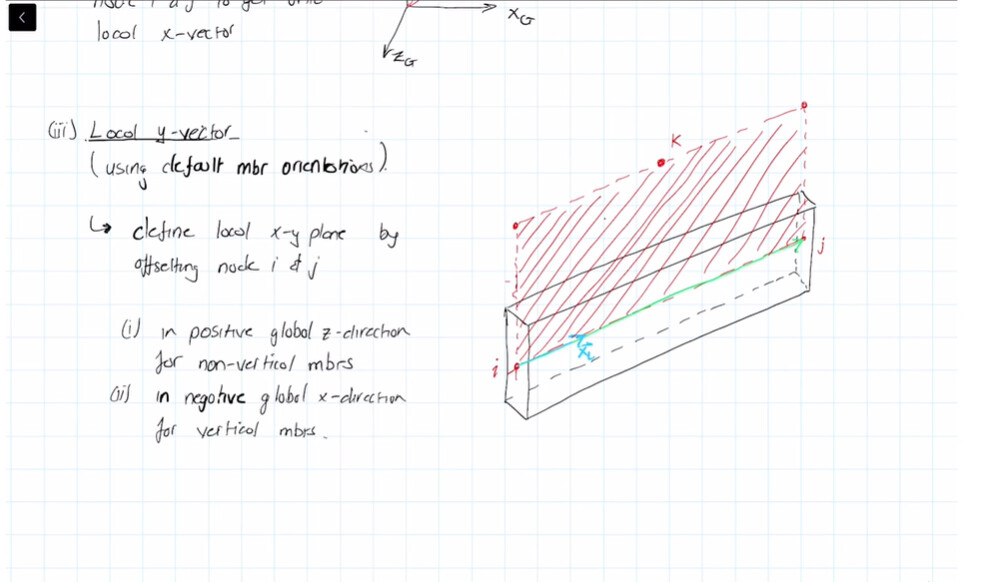
Offsetting from node i in the global Z-direction, will only give you the local y-axis, if the local and global reference frames are aligned…which we can’t count on.